


连接自动驾驶汽车和智能平交道口:事故预防的未来
发布日期:2022年3月23日小薇吉妮Taillandier|暂无评论
联网车辆在道路上变得越来越普遍,而且越来越趋向于自动化。2017年,SNCF创新与研究部门开发了一个项目,将平交道口改造成与道路车辆相连的十字路口。在这个项目成果的基础上,SNCF与法雷奥(Valeo)合作开始了新的挑战。SNCF互联平交道口项目经理Virginie Taillandier探讨了这一合作伙伴关系如何为自动驾驶和自动化车辆的出现做好准备并确保平交道口的安全。

虽然自动驾驶汽车似乎只存在于科幻小说中,但许多汽车,如特斯拉汽车,已经提供了一级自动化功能,允许司机委托他人控制速度和方向。目前,司机仍然必须监控环境,并在必要时重新获得控制权。然而,几家汽车制造商已经宣布,即将发布的汽车将提供更大范围的自动化,这将使汽车能够分析周围环境并采取相应的行动。
一个平交路口是铁路和公路的交叉路口。平交道口99%的事故是由于违反交通规则造成的;它是铁路死亡的第三大原因。
2017年,SNCF创新与研究部门启动了一项技术更新项目,将平交道口改造成与道路车辆相连的十字路口。2018年,一个原型的开发表明,平交道口可以在合作智能交通系统(C-ITS)生态系统中发挥关键作用。
2019年,SNCF作为相关合作伙伴加入了C-Roads项目。水平交叉被集成到C-ITS架构中(见图1),并在5G (Wi-Fi)和4G(蜂窝)中混合通信。目标是向车辆(V2X)发送关于平交道口状态(关闭、开放、施工中、故障)及其特征(高度、宽度、重量、速度或地面限制)的信息。
2019年和2020年在布列塔尼的一个平交道口进行了验证测试,包括C-Roads项目的国家和欧洲合作伙伴。
2020年出现了自动驾驶汽车的新挑战。我们相信自动/自动驾驶车辆可以进一步减少平交道口的事故数量,这一信念导致了HERMES项目的建立。
HERMES项目是SNCF和法雷奥的合作项目,结合了铁路和汽车方面的专业知识。HERMES项目有两个目标,一是为自动驾驶汽车的到来做好平交道口的准备,二是将平交道口作为道路上的用例,为汽车世界做好准备。
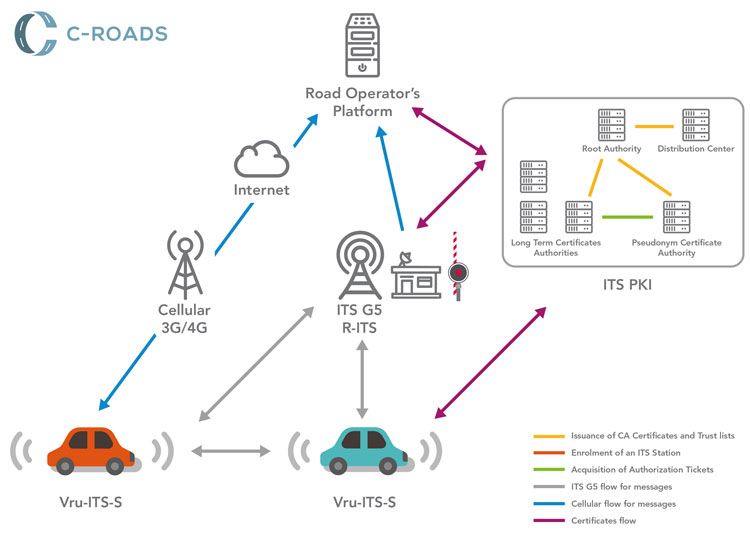
图1:C-Roads项目架构
什么是自动驾驶汽车?
自动驾驶汽车是一种能够在没有人类主动干预的情况下驾驶的道路车辆,这要归功于大量的传感器和计算软件系统或车载人工智能。汽车工程师协会(SAE)已经宣布有六个级别的自动化。
几年来,世界各地的道路法规开始发生变化。在2020年底,日本当局授权本田传奇3上市,它已经达到了自动驾驶3级。通过2021年4月发布的最新机动法条例,法国成为第一个调整道路和运输法规的欧洲国家,从2022年9月起,只要车辆获得批准,就允许自动驾驶车辆在道路上流通。
在HERMES项目中,我们选择专注于第3级和第4级。
HERMES项目方法
该项目于2020年开始,在法国制定了平交道口分类,即描述设备及其特征,允许自动/自动车辆识别平交道口(标志、灯光、障碍物)以及现有的道路配置。因此,通过这些元素,自动驾驶汽车可以区分它在道路上遇到的情况。
初步危害分析(PHA)已进行,以确定自动驾驶系统ADS(称为不受欢迎的事件).
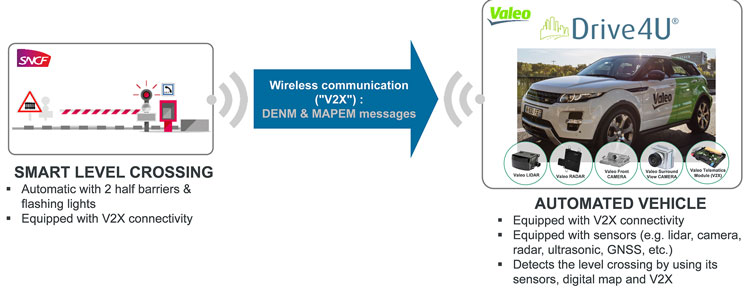
图2:V2X连接。
然后,三种不同类型的可靠性研究已经并行进行功能安全研究中,预期功能的安全性(SOTIF)研究和一个网络安全研究。目标是识别和评估由(分别)随机硬件故障、性能限制、网络攻击/恶意人类行为引起的ADS危险行为所造成的风险,并确定对策,以将此类风险降低到合理的水平。本项目重点研究了由于ADS感知道路和平交道口功能障碍导致的危险行为。这三项研究采用的方法学框架分别基于ISO 26262、ISO 21448和ISO 21434。
然后在三种反措施之间进行了一个调解阶段,以确保它们之间是一致的/不矛盾的/相互补充的。
示威活动
示威活动于2021年在Brec 'h(法国布列塔尼)的平交道口n°449举行,这是一个活跃的平交道口,配备了闪光灯和两个半栅栏。
平交道口管理系统连接到一个路边单元(RSU),负责通过无线通信(V2X通信)向自动车辆发送有关平交道口区域的信息(V2X消息),根据ETSI ITS通信协议栈进行标准化。
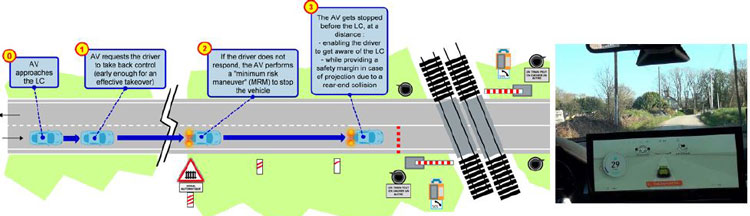
图3:场景1
自动驾驶车辆还配备了V2X连接(见图2),除了这种V2X连接外,还可以使用其外感传感器(如摄像头)和数字地图检测平交道口。
在演示过程中,进行了几个场景来测试两个系统的标称模态和降级模态,包括:
- 车辆自动通过开放平交道口
- 如果平交道口关闭了,车辆就会停在平交道口入口,直到障碍物完全重新开放,车辆才会通过
- 如果车辆没有能力通过平交道口,则车辆要求驾驶员收回控制权。如果驾驶员在规定时间内(演示期间为10秒)没有反应,车辆将在平交道口前停止(见图3,场景1)
- 在交通拥堵的情况下,当自动驾驶汽车接近一个开放的平交道口时,自动驾驶汽车会停下来,等待平交道口区域完全畅通后再进入(见图4,场景2和3)
- 如果在铁路轨道上检测到障碍物,车辆将上游停止,不进入铁路区域的危险区域。
自动驾驶车辆已经实现了目标场景,在功能和安全性(即没有危险行为)方面达到了预期的性能。特别是,通过V2X通信链路的平交道口所带来的辅助,在确保平交道口感知的冗余方面特别有用。
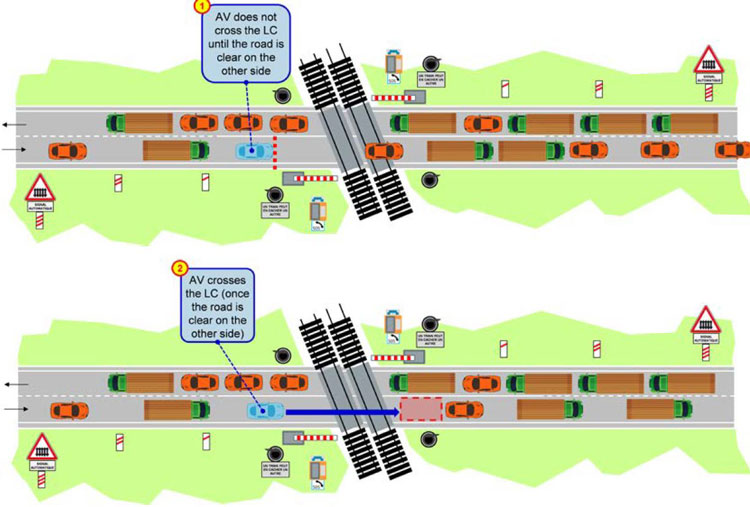
图4:场景2和3
结论
这些测试使我们能够验证SNCF和法雷奥之间的各种假设,特别是在功能安全和网络安全方面。
SNCF面临的挑战包括实现欧洲水平的平交道口用例的标准化,以及在批准自动/自动化车辆时创建车辆通过平交道口的标准能力。
对于SNCF来说,这是一个新的机会,使其在国际上超越铁路边界,从而使平交道口安全问题得到汽车和道路部门的重视。
 小薇吉妮Taillandier拥有市场营销硕士学位。她已经监督了Tech4Rail平交道口的创新与研究部项目SNCF自2017年以来。她在法国国家铁路公司(SNCF)的安全与安保部门(Réseau)担任了五年的国家级交叉路口专家。她于2015年在铁路运输部门开始职业生涯,曾在RATP(巴黎地铁和郊区交通)担任过与安保相关的不同职位。2010年,她还曾在汽车行业的信息系统领域工作。
小薇吉妮Taillandier拥有市场营销硕士学位。她已经监督了Tech4Rail平交道口的创新与研究部项目SNCF自2017年以来。她在法国国家铁路公司(SNCF)的安全与安保部门(Réseau)担任了五年的国家级交叉路口专家。她于2015年在铁路运输部门开始职业生涯,曾在RATP(巴黎地铁和郊区交通)担任过与安保相关的不同职位。2010年,她还曾在汽车行业的信息系统领域工作。





