机械电子转向架,新颖的设计
发布日期:2005年11月3日| |还没有评论
传统的转向架设计受到矛盾要求的根本冲突:高速运行稳定,但绝不是跟踪友好谈判时曲线由于僵硬的轮组指导,或者他们能够顺利跟随曲线跟踪通过轮的径向方向集,但是由于软轮组指导他们仅限于相当低速度运行稳定。
传统的转向架设计受到矛盾要求的根本冲突:高速运行稳定,但绝不是跟踪友好谈判时曲线由于僵硬的轮组指导,或者他们能够顺利跟随曲线跟踪通过轮的径向方向集,但是由于软轮组指导他们仅限于相当低速度运行稳定。
传统的转向架设计受到矛盾要求的根本冲突:高速运行稳定,但绝不是跟踪友好谈判时曲线由于僵硬的轮组指导,或者他们能够顺利跟随曲线跟踪通过轮的径向方向集,但是由于软轮组指导他们仅限于相当低速度运行稳定。
除此之外,稳定性还受车轮和轨道轮廓、轨道安装的倾角和实际轨距的影响,从而产生所谓的“等效圆锥度”。由于这些参数不同,例如,在法国和德国的铁路网之间,高速列车在“自己的”国家铁路网上全速运行时,必须遵守跨越边境的速度限制。
机械电子的转向架
这些传统的问题被庞巴迪运输的“机电反应声”解决了一种新颖的设计,该设计包括用于稳定和径向转向的主动系统的转向架车轮组。潜在的机电反应方法是一个整体哲学,在机械和电子产品之间最佳地分配系统任务。它旨在将系统的机制减少到其适当函数传递力的最低要求,而关于反应,适应和调整的一切是通过电动致动器和基于传感器的控制电子设备进行的,从而避免了传统的麻烦杠杆机制。我们的方法甚至超出了:电子产品的“即插即用”架构将通过系统或元素,即传感器进行交换时,通过系统自适应进行维护人员的任何调整工作。
主动径向转向和稳定控制
在机电转向架的核心是ARS -一个机电系统主动径向转向和稳定控制。
它包括每个轮对的一个高度动态执行器,用于检测各自轮对的瞬时运动的传感器和单独与每个轮对的执行器接合的控制逻辑。稳定控制的工作是通过抵消轮对的横向运动,这是由一些轨道不规则或谐波运动(正弦运行)造成的,与一个相反的运动。因此,没有不稳定性可以堆积,但车轮组保持平静。
由于不稳定是一个高度动态的过程,稳定控制的频率较高,最高可达15赫兹。为了在稳定性和曲线友好性之间架起桥梁,驱动系统必须允许轮对遵循一个弯曲的轨道,即在每个点的径向对齐。
这是由第二控制模式完成的,作用于低频,并与高频稳定控制叠加。ARS的好处是多方面的:
- 全高速性能,即稳定性高达400 kPH,在不同的轨道上,提供真正的互操作性
- 通过轮对曲线友好对齐,大大减少了车轮和轨道的磨损,并大大减少了横向轨道力
- 冗余和因此而忽略的被动稳定手段,如偏航阻尼器,这是车身噪音和振动的完美传输元素,导致更高的乘坐舒适性,减少隔音的努力
- 由于机械部件的省略而降低车辆质量
- 降低了轨道访问费用。现代的轨道接入收费方案考虑了车辆对轨道网络的影响,因此,通过应用ARS,它们会给车辆带来无与伦比的经济效益
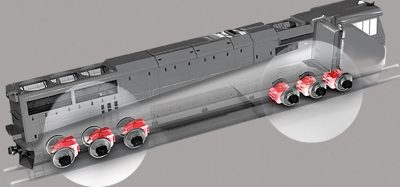
在目前的配置中,ARS是通过使用一个无刷电机作为执行器来实现的——安装在横向上——然后是一个减速齿轮和一个单边转向杆,在纵向上移动执行器侧面的轮对轴箱,而相对的轴箱纵向固定(图1)。这种布置运动学的轻微不对称很容易由控制器补偿。其他驱动原理正在调查中,系列实施的最终选择将基于以下排名标准:
- 铁路转向架在恶劣环境下的可靠性
- 成本-投资,运行和维护,即全部LCC -相对于已达成的效益
- 电力消耗
- 简单的安排
机械电子的原型实现转向架和ARS首次测试2002年夏天德国联邦铁路公司的全面滚筒试验台在慕尼黑(图3)。其转向架(图2)源自德国的系列拖车转向架VT612倾斜训练与被动地自动控制交联轮集。装备了一个改进的控制器版本,测试车辆在2003年12月达到了400公里/小时的最高速度(相当于试验台的极限)在滚柱试验台上的完全主动稳定性-基本的VT612设计仅被认证为160公里/小时!这些试验包括许多故障调查,根据CENELEC标准50 126至50 129为ARS的安全性分析提供了大量数据。
图4b显示了机械电子转向架与被动模式的“稳定图”(图4a)。每个单独的图显示了当车轮被铁轨的横向“台阶”撞击时的反应,实现了一个滚轮的突然横向位移,这是模拟试验台上的铁轨7.5毫米。这张图表显示了许多轮对和轨道配对的等效圆锥度和运行速度的组合。可以清楚地看到,在被动转向架的情况下,受激振动循环次数随着速度和锥度的增加而增加,直到动态运动不再消失。这些图定义了无源转向架的稳定极限,超过这个极限转向架就不稳定运行。相比之下,ARS的主动稳定在任何速度下都能立即抑制初始振动。
UIC传单518将稳定性极限定义为楼梯函数,给出了必须达到的速度极限,每个台阶的等效圆锥度。图5显示了(红色部分)这个UIC极限与不同版本的稳定性控制器获得的测试结果的对比。在横向台阶试验中,最优控制器的曲线远高于UIC处方。
如图6所示,测试运行使用记录的轨道不平稳性数据作为支持机电转向架的滚子的激励。在较高的圆锥度下,由于原型转向架的机械设计欠佳,所要求的极限不能完全满足。然而,机电一体化在这些测试中也表现出优异的性能。
综合机电整合转向架的测试运行,安装在测量倾斜火车租从德国联邦铁路公司(图7),在实际跟踪Wegberg-Wildenrath私营铁路测试中心(西杜塞尔多夫)2004年春季证明适当的函数不能弯曲的控制器的不足2.2米/ s2。在这个测试活动中,可以调查铁路开关的影响,这证明了不刺激鲁棒控制器的任何手段。在不同曲线半径的轨道上进行了几次测试,并在机电子转向架处于领先和落后位置时进行了几次测试,以评估不同的控制器版本,并获得关于系统在发生故障时的行为的额外信息。这些发现导致了控制器和系统的优化。
目前,一辆瑞典里贾纳列车正在进行修改,以便于2006年夏天早些时候在瑞典公共轨道网络上开始测试。最高时速250公里+ 10%认证。在这种情况下,电机转向架将配备ARS,驱动器将不得不承受牵引力和制动力;因此,一个更强的版本的驱动器将被应用。为了获得庞巴迪运输公司机电转向架系列开发的认证,这些试验,包括可靠性和冬季测试,将形成最后的障碍,旨在为常规客运服务。预计这将在2008年实现。
因此,在消费电子、机器人和航空航天工业(线传飞控)中闻名的机电一体化技术将会进入铁路行业。

图1:ARS驱动装置

图2:机械电子转向架原型

图3:在慕尼黑,在DB的滚轮钻机上安装了机电转向架的测试车辆

图4被动转向架稳定性图

图4b:采用主动稳定控制的机电转向架稳定性图

图5:阶跃激励下的稳定性

图6:赛道不规则情况下的稳定性

图7:Wegberg- Widenrath私人测试中心的测试列车下的机械电子转向架